Enhance Autonomous vehicle with high-quality training data
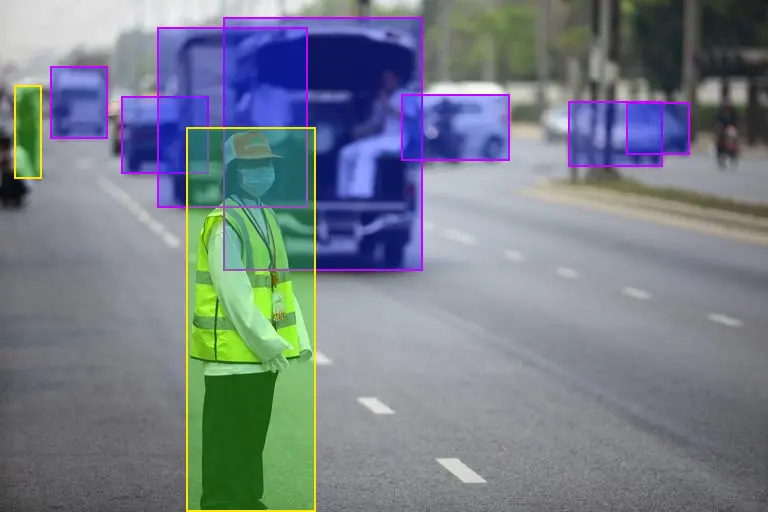
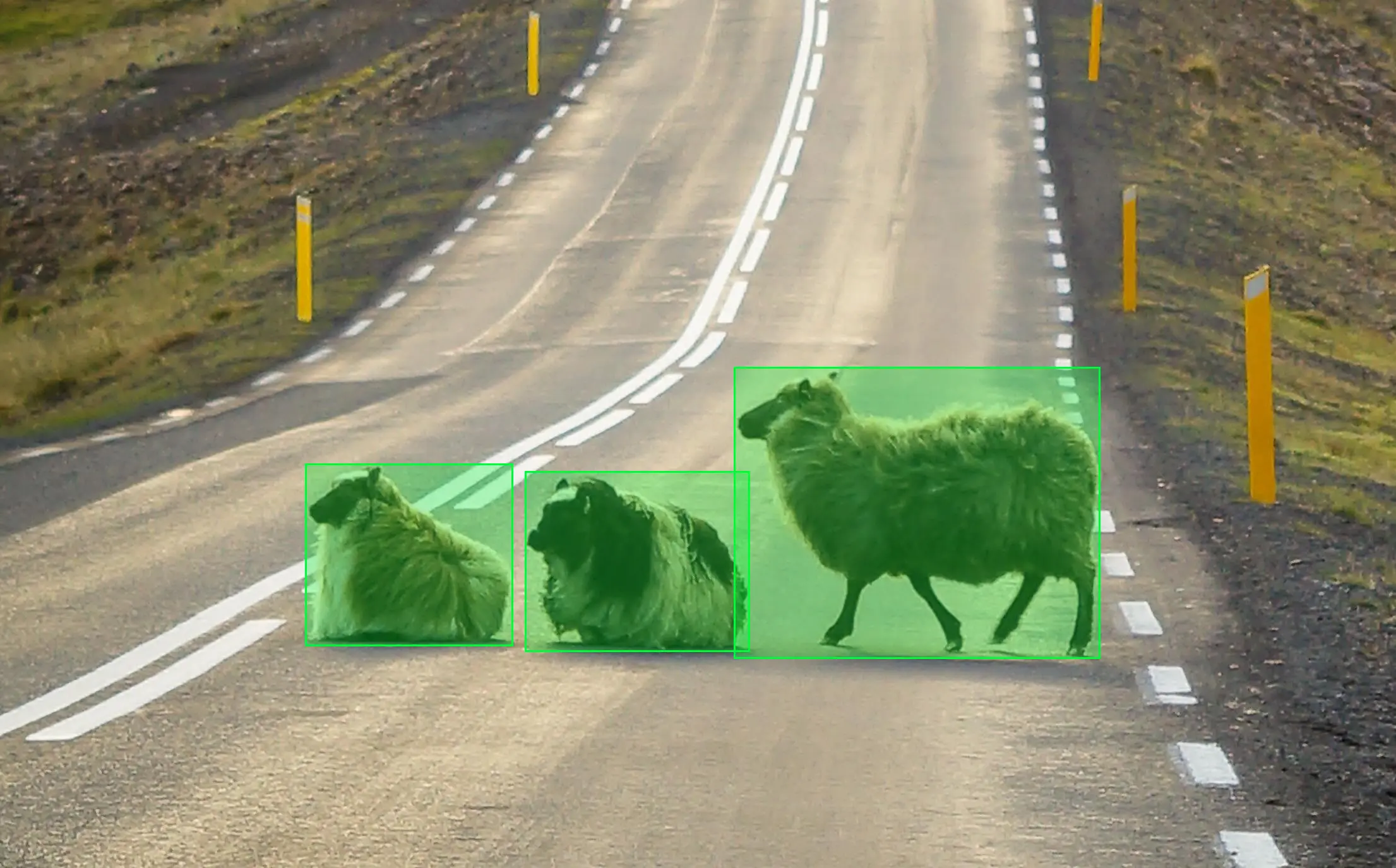
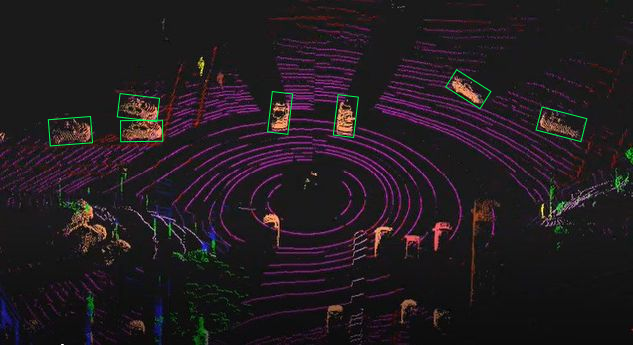
In order to navigate obstacles and operate effectively in chaotic real world traffic conditions, computer vision based models must be trained with annotated data that adds information and labels to images and video. We Assist you to prepare a wide range of datasets for training and validating autonomous vehicles